虚拟仿真实验
项目描述
|
2-1名称 工业机器人焊接虚拟仿真实验 |
|||||||||||||||||||||
|
2-2实验目的 实验背景: 工业焊接机器人作为世界上最引人瞩目的高新技术之一,在提高效率、稳定产品质量、提升企业竞争力方面,有着无可替代的作用。很多国家己经将工业机器人技术的发展列入发展计划,中国也在《中国制造2025规划纲要》中明确提出加快工业机器人等智能制造装备的发展。我校联合相关单位共同研发的(具有完全自主知识产权)工业机器人焊接虚拟仿真实验项目以培养高技能、高素质的应用型人才为目标,广泛借鉴先进教学理念,着重从专业教学知识体系的建设、实践教学体系的构建、学生创新创业训练等方面入手,基于真实的工作岗位、选取典型的企业案例、围绕真实的工作过程,通过实操工业级设备,采用“三位一体”协同开发模式,实现“理论、虚拟仿真、真机实操一体化”新一代教学与实训系统,培养与企业、社会需求相一致的应用型专业人才。 实验必要性: (1)改善了学生的学习条件。采用虚拟机器人学生只是用电脑来进行学习,远离了焊接弧光、烟雾和飞溅等,对于学生来说,能够更加安全透彻的学习到焊接机器人的有关知识。 (2)提高学习效率。电脑没有疲劳,可以连续不断的进行学习,而且电脑在高校完全可以达到人手一台,而焊接机器人设备,费用过高,损耗率过大,同时可操作的人员太少,无法大批量进行人员学习。 实验目的:
|
|||||||||||||||||||||
|
2-3 实验课时 (1)实验所属课程所占课时:40 (2)该实验项目所占课时:6
|
|||||||||||||||||||||
|
2-4实验原理(简要阐述实验原理,并说明核心要素的仿真度) 机器臂由七个金属部件构成,它们是用六个关节接起来的。计算机将旋转与每个关节分别相连的步进式马达,以便控制机器人(某些大型机器臂使用液压或气动系统)。与普通马达不同,步进式马达会以增量方式精确移动。这使计算机可以精确地移动机器臂,使机器臂不断重复完全相同的动作。机器人利用运动传感器来确保自己完全按正确的量移动。机器手往往有内置的压力传感器,用来将机器人抓握某一特定物体时的力度告诉计算机。这使机器人手中的物体不致掉落或被挤破。 知识点:共10个,具体为:
(8)工业机器人焊接轨迹设置 (9)清枪剪丝轨迹设置 (10)工业机器人环境结构 |
|||||||||||||||||||||
|
2-5实验仪器设备(装置或软件等) 1)硬件环境:计算机(独立显卡,4G显存、主频4核、内存8G、储存容量500G),虚拟现实设备(手柄,头盔),手机。 2)软件:工业机器人虚拟仿真实验教学系统、浏览器(Chrome60.0以上、Firefox55.0以上、IE11.0以上)。
|
|||||||||||||||||||||
|
2-6实验材料(或预设参数等) 1)3D模型:实验项目中涉及的设备模型、场景模型、线路模型等所有三维模型的建立,在虚拟场景中进行实验模拟。 2)数据资料:实验过程中所有需要设置的参数数据。表单如下:
|
|||||||||||||||||||||
|
2-7 实验教学方法(举例说明采用的教学方法的使用目的、实施过程与实施效果) 系统基于虚拟现实、多媒体、三维可视化等技术,改革教学模式,构建高度仿真的虚拟实验环境和实验对象。融合互联网+教育的多样化教学手段,在线教学和实验仿真交互,建立网上虚拟仿真课程,打造学生自主学习、交流、合作的开放式学习环境。 工业机器人焊接虚拟仿真实验,不仅打破时空限制,实时、实地给学生提供虚拟仿真的实验条件,还能避免真实机器人焊接操作所带来的各种危险,让学生在三维虚拟环境中开展仿真实验,弥补真实设备实验中的不足,提高实验效果。通过虚拟仿真软件,可使学生了解并掌握工业机器人焊接的技术和方法,完成虚拟实验后再进行实物实验,加强了学生的安全保障的同事,提高实验效果,也降低了实验教学成本。 |
|||||||||||||||||||||
|
2-8实验方法与步骤要求(学生交互性操作步骤应不少于10步)
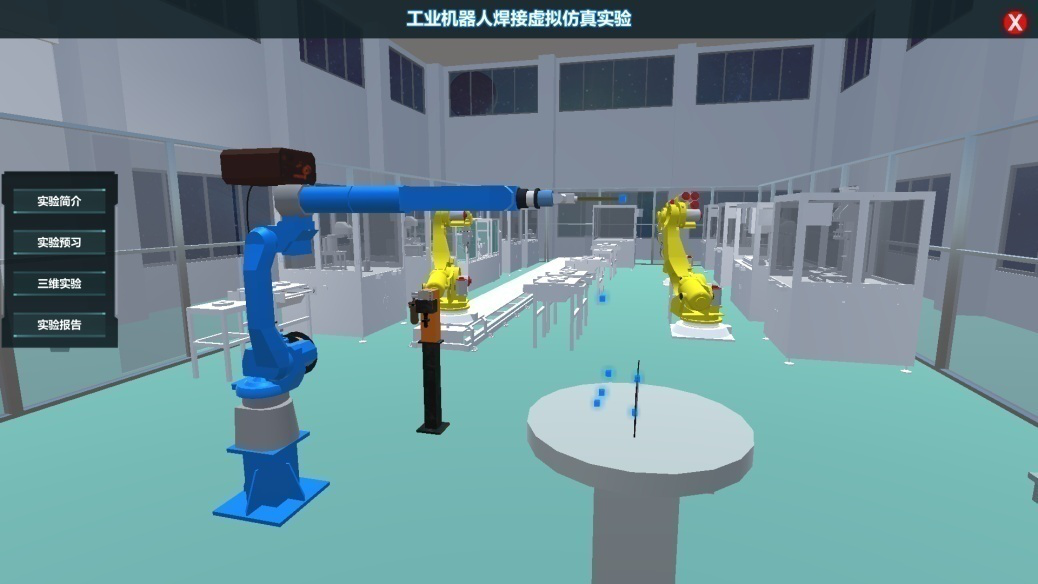
本项目将实验流程中的场景模型,设备模型分别进行构建,用户在场景中,能够在场景布局模块中了解设备该放置的正确位置,能够在设备布线模块知道每个设备中的每条线路的链接目标在哪,更能够在任务编程模块中明白轨迹编程和PLC编程的内容和意义。
查看实验目的、实验原理、实验方法和实验帮助。
通过预习模块了解机器人焊接相关的基础知识。
进入场景后,首先根据文字提示点击高亮的总电源进行总电源打开操作,点击总电源后,机器人交互系统会进行开机操作,当开机进度条满之后会提示用户进行机器人焊接轨迹设定。
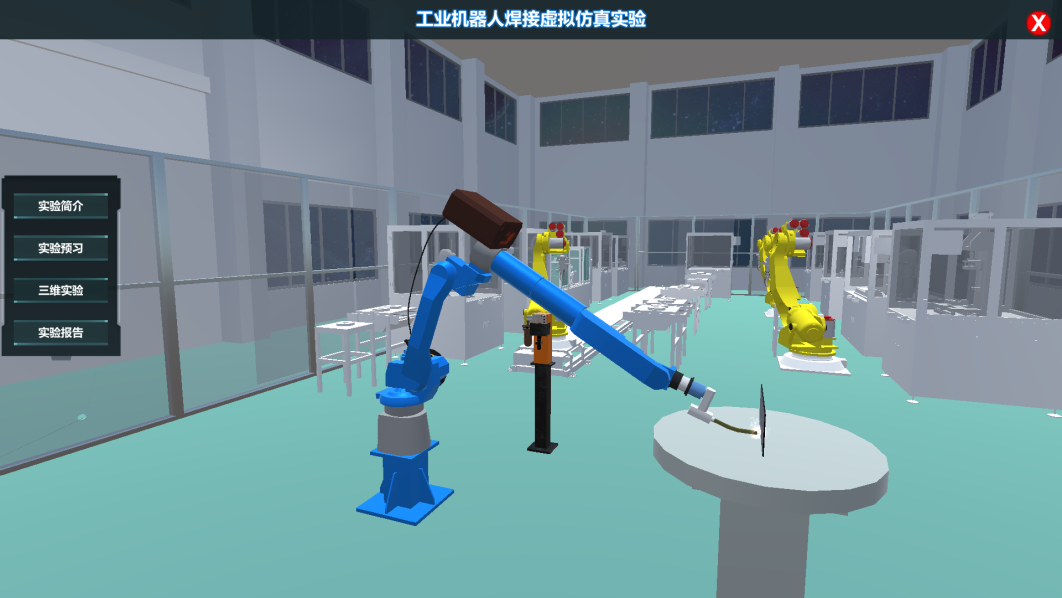
到达轨迹点设置步骤后会在需要操作的机器人旁边显示出需要选择的轨迹点,并且图示用户进行机器人焊接轨迹设定。
鼠标放置在轨迹点上会显示当前轨迹点名称,若要选取当前轨迹点,鼠标左键点击一下轨迹点即可。选取过第一个轨迹点之后,被选取的轨迹点会变为绿色高亮状态。
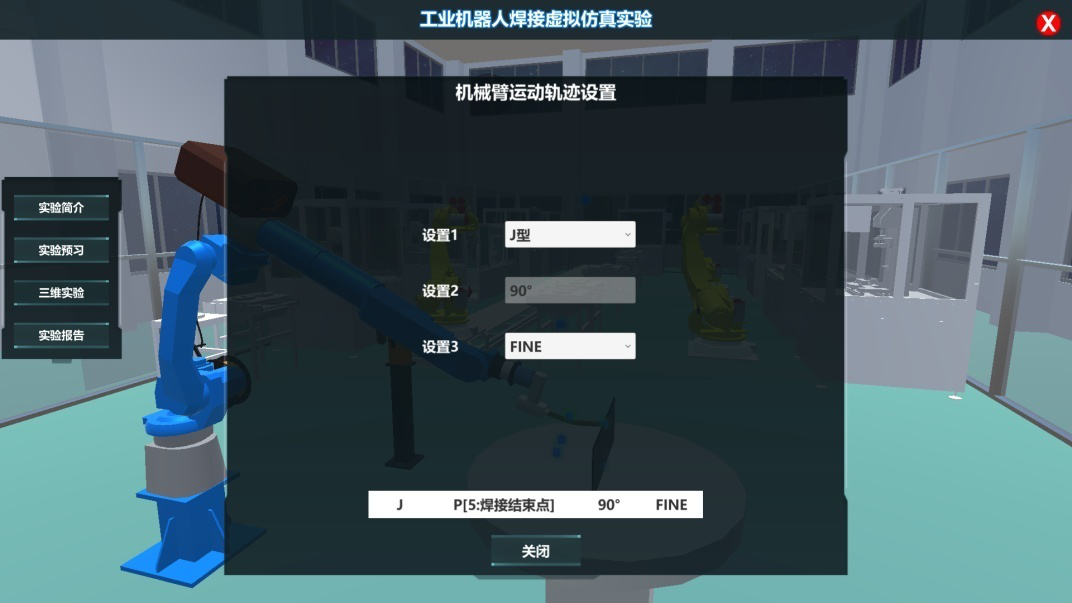
轨迹设置界面要在第一次完成轨迹点选取才可以进行焊接姿态设置。此时需要设置机器人的运动类型,焊炬姿态,定位类型等参数。底部会有当前选取的状态栏,第一个参数为当前选取运动类型,第二个参数为当前所选取的起始轨迹点名称,第三个参数为当前选取的焊炬姿态,第四个为当前选取的定位类型。
当焊接操作的焊接过程重播完成之后会进入清枪剪丝过程阶段,当清枪剪丝过程轨迹点选取结束后,也会进行一次清枪剪丝的过程重放,清枪剪丝过程重放结束后,会进入PLC编程阶段。
PLC编程完成后机器人将会把焊接和清枪剪丝都从头进行一遍,此次焊接将会显示焊接效果和焊接特效。
|
|||||||||||||||||||||
|
2-9实验结果与结论要求
实验报告格式如下: 实验报告 实验者姓名:xxx 实验时常:xxxx 实验内容及说明:xxxxxx 实验综合评分:xxxxxx 实验结论:xxxxx 实验详情见下表: 工业机器人焊接虚拟仿真实验报告 实验者姓名: 实验时常:
|
|||||||||||||||||||||
|
2-10考核要求
|
|||||||||||||||||||||
|
2-11面向学生要求 本项目在实现了校内实验资源共享的基础上,还将进一步依托“数字化网络教学平台”,将虚拟仿真实验从校内共享蔓延到省内乃至全国,为相关专业领域的兄弟院校(本、专、职)提供教学资源与技术指导。 面向学生的具体要求如下: 1、本科类院校学生 (1)专业与年级要求 机自、机电、机器人等相关专业领域的大二以上学生。 (2)基本知识和能力要求 掌握机械、自动控制、力学、计算机等相关领域所涉及的专业知识与技能。 2、高职高专类院校学生 (1)专业与年级要求 机械设计、故障维修、机械加工等相关专业领域的大二以上学生。 (2)基本知识和能力要求 掌握机械、自动控制、力学、计算机等相关领域所涉及的专业知识与技能。 3、中、小学学生 通过科普体验,培养孩子们的学习兴趣和一般认知能力。 |
|||||||||||||||||||||
|
2-12实验项目应用及共享情况
(勾选“是”,请附所属课程教学大纲)
|
|||||||||||||||||||||